
Kostengünstigen passiven Radarempfängers basierend auf IoT-Hardware
Zusammenfassung: In den letzten Jahren hat die Rechenleistung von Internet of Things-Geräten wie dem Raspberry Pi zugenommen. Es ist heute üblich, dass solche Plattformen mehrere CPU-Kerne mit Taktungsraten von 1 Gigahertz und mehr aufweisen. Wir haben diese Entwicklung als Ansporn genommen, um zu sehen, wie weit wir die Grenzen bei der Durchführung komplexer Operationen an einer großen Datenmenge durch die Implementierung eines passiven Radarsystems auf dem Raspberry Pi pushen können. Um die Kosten unseres Systems weiter zu senken, haben wir den Einsatz kostengünstiger RTL-SDR-Empfänger evaluiert.
Unsere Arbeit zeigt, dass heutige IoT-Geräte Echtzeitverarbeitung für passive Radar-Anwendungen sowohl für FM- als auch für DAB-Signale ermöglichen. Mit unserem kostengünstigen Empfänger konnten wir Echos von Flugzeugen mehrere Kilometer entfernt empfangen.
I. EINLEITUNG
Internet der Dinge (IoT)-Geräte, wie kostengünstige Software-definierte Radio-Dongles und Raspberry Pis, haben in letzter Zeit die Überwachung des Luftverkehrs für die Öffentlichkeit zugänglich gemacht. Da diese Geräte sehr erschwinglich sind, haben viele Forscher, Luftfahrt-Enthusiasten und sogar Unternehmen begonnen, ADS-B- und sekundäre Radar (Mode S)-Signale mit ihnen aufzuzeichnen, um Flugzeuge zu verfolgen. Webbasierte Plattformen wie FlightAware , Flightradar24 oder das OpenSky Network sind entstanden, die auf Tausenden solcher IoT-Geräte angewiesen sind, um beliebte globale Echtzeit-Flugverfolgungsdienste im Internet zu betreiben.
Der Erfolg dieser IoT-Geräte beim Empfangen von Flugzeugsignalen hat uns dazu veranlasst, ihre Anwendbarkeit für den Aufbau von passiven Radarsystemen zu untersuchen. Im Gegensatz zu ADS-B oder sekundärem Radar verfolgt ein passives Radarsystem Flugzeuge, indem es Signalreflexionen von Gelegenheitsstrahlern wie FM-, DAB- oder DVB-T-Übertragungen nutzt. Trotz der Beliebtheit von ADS-B und sekundärem Radar für die Luftüberwachung ist passives Radar eine interessante Alternative, da es ermöglicht, Flugzeuge oder Drohnen zu verfolgen, die nicht mit einem Transponder ausgestattet sind oder diesen ausgeschaltet haben.
Passives Radar ist jedoch von Natur aus rechenintensiver und erfordert eine viel höhere Signalqualität als ADS-B oder Mode S-Decodierung. Diese Signale sind nicht für die Flugzeugverfolgung moduliert, und die Signalstärke der Reflexionen ist natürlich viel schwächer im Vergleich zu den hochenergetischen Signalen, die aktiv von Flugzeugen übertragen werden. Eine zentrale Frage, die wir in dieser Arbeit bewerten, ist daher, ob die begrenzten Fähigkeiten von IoT-Geräten ausreichen, um Flugzeuge mithilfe von passiven Radaralgorithmen zu erkennen.
Zu unserem Vorteil haben wir einen enormen Anstieg der Rechenleistung erlebt, nicht nur bei High-End-Geräten, sondern auch bei IoT-Computing-Plattformen wie den neueren Versionen des Raspberry Pi. Während vor einem Jahrzehnt ein Linux-Cluster aus sechs Computern in der Lage war, alle 5 Sekunden eine Range-Doppler-Karte zu erstellen , werden wir zeigen, dass wir heute mit Rechenausrüstung für weniger als 100 USD einen passiven Radarempfänger implementieren können, der Flugzeuge recht gut erkennen kann. Wir setzen auf einen Raspberry Pi 3 Model B, ausgestattet mit einem RTL-SDR-Radio-Stick, um die Radiosignale zu empfangen, zu digitalisieren und unsere Signalverarbeitung durchzuführen. Um komplexe Signalverarbeitungsoperationen durchzuführen, entwerfen wir eine Softwarearchitektur, die auf der eingebetteten GPU des Raspberry Pi basiert und die parallele Architektur solcher Verarbeitungseinheiten nutzt.
Der Beitrag unserer Arbeit besteht darin zu zeigen, wie heutige energiearme und erschwingliche IoT-Geräte dazu verwendet werden können, rechenintensive Signalverarbeitung in dem Maße durchzuführen, dass wir tatsächlich Ziele aus Signalen sehen können, die rein auf einem aktuellen Raspberry Pi-Computer verarbeitet werden. Wir haben gezeigt, dass - trotz der geringen Auflösung des RTL-SDR - seine Leistung immer noch für passive Radar-Anwendungen geeignet ist.
II. HINTERGRUND
Das Konzept von passiven Radarsystemen ist bereits seit mehreren Jahrzehnten bekannt, und die ersten Umsetzungen gehen auf den Zweiten Weltkrieg zurück [6]. Hauptvorteile eines solchen Systems sind der wesentlich geringere Energieverbrauch aufgrund des Verzichts auf eigene Sendestationen und - abgesehen von der visuellen Erkennung seiner Antennen - höhere Chancen, dass das Radarsystem vor bösartigen Dritten verborgen bleibt.
Passives Radar nutzt Signale von einem sogenannten "Illuminator of Opportunity", dessen Signale von einem oder mehreren Empfängern genutzt werden können. Ein solcher Empfänger ist in der Regel mit mindestens zwei phasenkohärenten Kanälen ausgestattet. Mit einer Antenne, die auf den eigentlichen Illuminator zeigt - als Referenzkanal bezeichnet - während die Antenne(n) des Überwachungskanals auf den Interessensbereich gerichtet ist/sind. In dieser Arbeit konzentrieren wir uns auf passive Radarsysteme, die nur über einen Überwachungskanal verfügen. Das verteilte Design des Senders und Empfängers bedeutet, dass passive Radarsysteme im Allgemeinen bistatisch sind, im Gegensatz zu klassischen monostatischen Radarsystemen. Die große schwenkbare parabolische Antenne in klassischen Radarsystemen empfängt sowohl die Entfernung als auch die Richtung des Echos. Passive bistatische Radarsysteme messen andererseits die Zeitverzögerung der Echos, die nicht die absolute Entfernung des Ziels und des Empfängers darstellen, sondern vielmehr die zusätzliche Zeit, die das Signal vom Sender zum Ziel und von dort zum Empfänger zurücklegt. Ziele in passiven bistatischen Radarsystemen können daher nur in einer Ellipse in Ein-Empfänger-, Ein-Sender-Setup (siehe Abbildung 1) lokalisiert werden. Zusätzlich messen solche Systeme den Dopplerverschiebung aufgrund der relativen Geschwindigkeit des Ziels zum Sender und zum Empfänger.
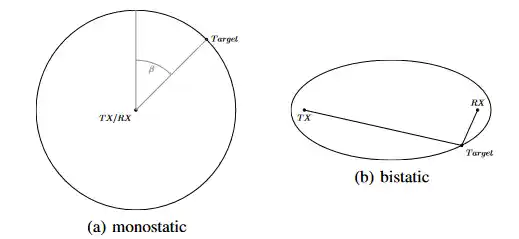
Fig. 1. Vergleich der monostatischen (a) und bistatischen (b) Radar-Topologien. In der Regel können monostatische Radare sowohl die Entfernung als auch den Azimut aus den Echos extrahieren, während passive bistatische Radare mit nur einem Überwachungskanal nur die bistatische Entfernung und den Doppler-Effekt extrahieren können.
In vorherigen Arbeiten war ein Cluster von sechs Computern erforderlich, um eine Reichweiten-Doppler-Karte (RDM) in etwa 5 Sekunden zu berechnen. Das Aufkommen von ARM-basierten kostengünstigen Rechnerplattformen hat ihre Rechenleistung über das hinausgetrieben, was vor einem Jahrzehnt als State-of-the-Art galt. In den letzten Jahren wurden daher Anstrengungen unternommen, die Verarbeitung von passivem Radar auf eingebetteten Geräten zu ermöglichen, z. B. die Nvidia Jetson-Plattform mit 192 CUDA-Kernen und einem Quad-Core-ARM-CPU . Unsere Arbeit zielt darauf ab, die Grenzen dessen zu erweitern, was für eine Verarbeitungseinrichtung von weniger als 100 USD tatsächlich möglich ist. Dies eröffnet neue Anwendungen für passives Radar im Bereich Crowdsourcing oder verschiedene Forschungszwecke.
III. SYSTEMARCHITEKTUR
Dieser Abschnitt beschreibt die Systemarchitektur unseres passiven Radar-Systems und gibt Details zu den Optimierungen der Signalverarbeitung, die wir vorgenommen haben, um die Berechnungen zu beschleunigen.
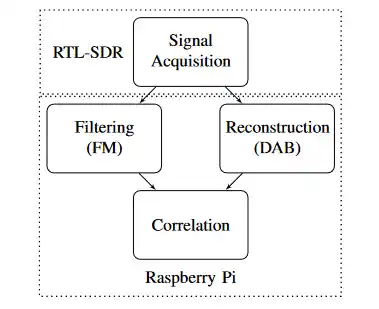
Abb. 2. Hochrangiger Fluss von Signaldaten innerhalb unserer Verarbeitungspipeline.
Abbildung 2 gibt einen Überblick über unsere Architektur auf hoher Ebene. Die Signalgewinnung erfolgt über die RTL-SDR-Plattform für softwaredefiniertes Radio. Sie übergibt die rohen IQ-Samples.
Entweder gelangt das Signal in die Filter- oder die Rekonstruktionsphase, abhängig davon, ob wir Frequenzmodulation (FM) oder digitale Audioübertragung (DAB) als Grundlage für unsere Berechnungen verwenden. Diese Unterscheidung ergibt sich daraus, dass DAB als digitales Signal übertragen wird, im Gegensatz zu den analogen FM-Übertragungen. Für den FM-basierten Betrieb müssen wir den Referenzkanal aufzeichnen, um das Überwachungssignal zu filtern und das Referenzsignal für die Korrelationsphase bereitzustellen. Bei DAB benötigen wir dagegen nur das Überwachungssignal, aus dem wir das Referenzsignal rekonstruieren können. Die verarbeiteten Proben werden schließlich an die Korrelationsphase übergeben, in der ein RDM berechnet wird, der dann die empfangenen Echos zeigt. Die Detektionsstufe wird in dieser Arbeit ausgelassen, da die tatsächliche Lokalisierung und Verfolgung von Zielen mit passiven Radarsystemen mehrere Sensoren an verschiedenen Standorten erfordert. Die Lokalisierung muss daher in einem zentralisierten Hub durchgeführt werden, der in unserer Architektur dann die eigentliche Zielentdeckung, -lokalisierung und -verfolgung durchführt.
A. Gelegenheits-Illuminatoren
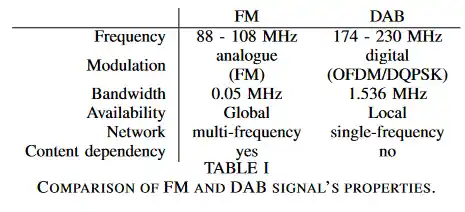
Wir haben unser System sowohl für analoge FM- als auch für digitale DAB-Radioübertragungen implementiert. Beide bieten einzigartige Vorteile, haben jedoch andererseits klare Nachteile. Tabelle I gibt einen Überblick über die beiden Illuminatorsignale. Die Leistung eines FM-basierten passiven Radarsystems hängt stark vom übertragenen Inhalt ab. Sprachübertragungen sind aufgrund der geringeren Entropie im Signal und zusätzlicher Pausen zwischen Wörtern und Sätzen am wenigsten nützlich. Musikübertragungen von Pop und Rock mit ihrer hohen dynamischen Kompression führen zu einer höheren Entropie im Spektrum und neigen nicht dazu, eine hohe Korrelation mit anderen Teilen der Übertragung zu haben. DAB-Übertragungen hängen dagegen weniger vom Inhalt einer einzelnen Übertragung ab, da mehrere Programmdatenströme sowohl in Frequenz als auch in Zeit miteinander verflochten sind. Außerdem wird der Bitstrom verflochten und verschlüsselt, um der Übertragung zusätzliche Entropie hinzuzufügen, was die Demodulation und Dekodierung robuster macht.
B. Radio-Frontend
Unser vorgeschlagenes kostengünstiges System verwendet eine RTL-SDR-Plattform. Konkret verwenden wir den RTL-SDR V3-Dongle , ausgestattet mit einem TCXO, der eine Frequenzstabilität von besser als 0,2 PPM bietet [9]. Dieses softwaredefinierte Radio verwendet einen Realtek RTL2832U-Chip mit einem 7-Bit-ADC und einen Rafael Micro R820T2-Chip als Radiotuner. Die Erfassung von FM-Signalen für passive Radarzwecke erfordert zwei phasenkohärente
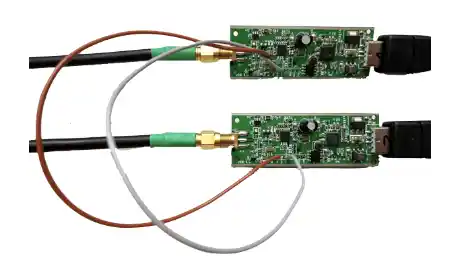
Fig. 3. Unser phasenkohärentes Setup besteht aus zwei RTL-SDR-Dongles, wobei das Takt-Signal von einer Leiterplatte über die hinzugefügten Kabel zum anderen übertragen wird.
Radio-Frontends. Der RTL-SDR V3 bietet Lötflächen auf seiner Leiterplatte, um das Takt-Signal von einem Empfänger abzuleiten und es in zusätzliche Geräte einzuspeisen (siehe Abbildung 3). Für den Empfang von FM-Signalen verwenden wir zwei phasenkohärente RTL-SDRs mit Abtastraten von jeweils 240 kS/s und für DAB verwenden wir einen einzigen RTL-SDR mit einer Abtastrate von 2,048 MS/s.
C. Rechenplattform
Unsere passive Radar-Anlage ist für die Raspberry Pi-Plattform implementiert. Insbesondere verwenden wir das Modell 3B, das mit einem 1,2 GHz Quad-Core ARM Cortex-A53-Prozessor mit einer Dual-Core VideoCore IV GPU ausgestattet ist. Generell haben wir versucht, die Software-Pipeline hardwareunabhängig zu schreiben und Compiler-Flags zu verwenden, um entweder die generische FFTW-Bibliothek oder GPU FFT für Instanzen auf dem Raspberry Pi zu nutzen. Ein Nachteil bei der Verwendung der GPU des Raspberry Pi ist, dass wir nur FFT-Längen von Potenzen von zwei berechnen können. Diese Einschränkung wird unsere Designentscheidungen für die endgültige Länge der Korrelationen sowohl im Zeit- als auch im Frequenzbereich bestimmen. Unsere Pipeline verwendet einen modularen Ansatz, bei dem jeder Verarbeitungsschritt ein eigenes Programm ist und - im Moment - jeder von ihnen das Quellsignal aus einer Datei liest und seine Ausgabe in eine neue Datei schreibt.
D. Signalverarbeitung
Wir haben die Verarbeitungsschritte wie unten beschrieben und in Abbildung 2 dargestellt implementiert.
1) Unterdrückung direkter Signalinterferenzen (DSI): In einem FM-Setup wird die Überwachungsempfangskette immer noch stark von den sehr starken direkten Signalen beeinflusst. Um Echos im Überwachungssignal sichtbar zu machen, müssen wir zunächst die direkten Signalinterferenzen entfernen.
Hierfür verwenden wir einen Fast-Block Least Mean Square (FBLMS) Filter. Er bietet einen guten Kompromiss zwischen Rechenzeit und Leistung bei der DSI-Entfernung . Der FBLMS-Filter ist ein adaptiver Filter, der an Signalblöcken sowohl des Referenz- als auch des Überwachungssignals arbeitet. Der Filter erzeugt Gewichte zur Schätzung der Menge des Referenzsignals im Überwachungskanal, die dann aus dem Überwachungssignal entfernt und als angenommenes "sauberes" Überwachungssignal ausgegeben werden. Das gefilterte Signal und das Referenzsignal
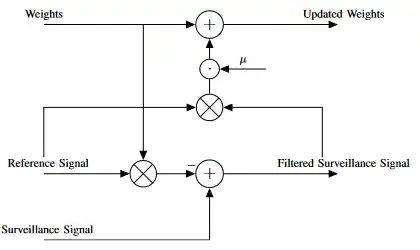
Fig. 4. Blockdiagramm des FBLMS-Filters.
Die Gewichte des Filters werden dann verwendet, um die Gewichte für den nächsten Block zu aktualisieren. Abbildung 4 gibt einen schematischen Überblick über das Filterdesign.
2) Rekonstruktion des Referenzsignals: Da das DAB-System die Referenzsignalkette auslässt, müssen wir das ursprünglich übertragene Signal aus der Überwachungskette rekonstruieren. Wir demodulieren daher das OFDM-Signal und ordnen die Punktewolken der π/4 differentiellen QPSK-Konstellation einem optimalen, "rauschfreien" Signal zu und behandeln dies als das angenommene Direktsignal (siehe Abbildung 5). Dieser Ansatz ist analog zu verschiedenen früheren Arbeiten. Für weitere Verarbeitungsschritte entfernen wir das Nullsymbol, da es nicht viel Energie hinzufügt und daher für den Korrelationsprozess nicht geeignet ist.
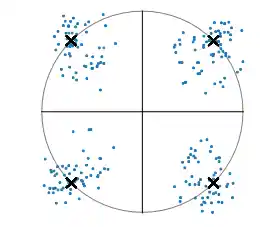
Fig. 5: Die demodulierten OFDM-Symbole (Punkte) werden gemäß ihrer Positionierung in den vier Quadranten der komplexen Ebene auf dem Einheitskreis einem der vier erwarteten Trägerwerte (x) zugeordnet.
3) Erzeugung der Range-Doppler-Karte: Im letzten Schritt unserer Pipeline nehmen wir die Überwachungs- und Referenzsignale und korrelieren sie über eine bestimmte Integrationszeit, um die schwachen Echos über dem Rauschpegel anzuheben. In einem klassischen Ansatz würde man frequenzverschobene Kopien des Referenzsignals erstellen und jede der Kopien mit dem Überwachungssignal korrelieren, das Ergebnis in eine zweidimensionale Matrix stapeln.
Um die Rechenlast zu reduzieren, verwenden wir stattdessen den Batches-Algorithmus als Grundlage unserer Pipeline. Dieser Algorithmus approximiert den Phasenverlauf, indem er eine konstante Phase während jeder verarbeiteten Charge annimmt. Um die RDM zu erstellen, schneiden wir beide Eingangssignale in gleich große, zeitlich ausgerichtete Chargen. Die entsprechenden Chargen aus jedem Kanal werden mittels der schnellen Fourier-Transformation (FFT) miteinander korreliert und die Ergebnisse in ein zweidimensionales Array gestapelt. Schließlich berechnen wir die FFT des zweidimensionalen Arrays spaltenweise, was die RDM ergibt. Abbildung 6 gibt einen visuellen Überblick.
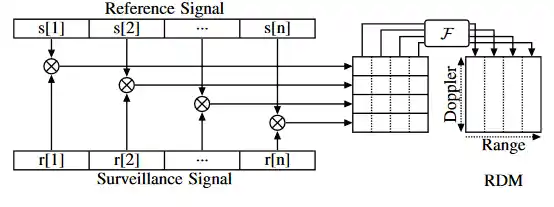
Fig. 6. Generisches Schema der Range-Doppler-Kartenbildung unter Verwendung des Batch-Algorithmus. Das Symbol ⊗ steht für die zyklische Kreuzkorrelation.
Über das RDM-Generierungsverfahren, wie es in unserer Verarbeitungspipeline implementiert ist. Dieser Schritt belastet die Verarbeitungsressourcen erheblich, da er insgesamt drei Fourier-Transformationen pro Batch erfordert. Eine Fourier-Transformation und eine zusätzliche inverse Transformation sind erforderlich für die Korrelation der beiden entsprechenden Batches, und eine Fourier-Transformation wird auf jeder Spalte des zweidimensionalen Zwischenarrays durchgeführt. Für DAB verwenden wir eine FFT-Größe von 2048 Samples im Bereichsbereich und 512 Samples im Doppler-Bereich, was uns ein kohärentes Verarbeitungsintervall (CPI) von 0,6 s und eine Integrationszeit von 0,5 s gibt, da wir den zyklischen Präfix vor jedem DAB-Frame entfernen müssen. Diese Werte entsprechen einer Reichweitenauflösung von etwa 150 m und einer Doppler-Auflösung von 1,56 Hz. Für die FM-Verarbeitung verwenden wir eine FFT-Größe von 512 Samples für beide Bereichs- und Doppler-Bereiche, was eine Integrationszeit von 1,1 s ergibt.
Da unsere Referenzsignalrekonstruktion (DAB) und DSI-Unterdrückung (FM) bereits unser aufgezeichnetes Zeitsignal in den Frequenzbereich transformieren und auch das Referenzsignal im Frequenzbereich generieren, können wir die anfängliche FFT-Operation für die zyklische Kreuzkorrelation bereits weglassen. Um die Leistung unseres Programms weiter zu verbessern, führen wir nicht sofort eine inverse Fourier-Transformation in der Kreuzkorrelation durch, sondern füllen zuerst die zweidimensionale Matrix und führen dann eine zweidimensionale FFT über die gesamte Matrix durch. Aufgrund des instabilen Oszillators in unserem SDR, der zu Frequenzdrifts am Radio-Frontend führt, führen wir vor der Ausgabe eine Rezentrierung jeder RDM durch automatische Erkennung der Null-Doppler-Linie als abschließenden Schritt durch.
IV. BEWERTUNG
In diesem Abschnitt bewerten wir unser Prototypsystem anhand der Verarbeitungsüberlastung und der passiven Radarleistung. Wir zeigen hauptsächlich die Ergebnisse für unser auf DAB basierendes System und beziehen einige Daten zur Verarbeitungsleistung des FM-Systems mit ein.
A. Verarbeitungsleistung
Obwohl die Raspberry Pi 3-Plattform einen Quad-Core-ARM-Prozessor bietet, ist allein seine Rechenleistung zu gering, um eine Echtzeitverarbeitung der gesamten passiven Radar-Pipeline zu ermöglichen. Daher bewerten wir, wie viel Geschwindigkeitssteigerung erreicht werden kann, wenn die GPU für die FFT-Verarbeitung verwendet wird. Abbildung 7 zeigt die Verarbeitungszeiten für die Referenzsignal- und Range-Doppler-Kartengenerierung. Wir führten die Berechnungen in den folgenden Konfigurationen durch:
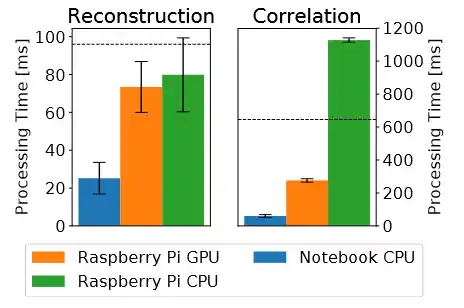
Fig. 7. Leistungsdaten für die Rekonstruktion des Referenzsignals eines DAB-Rahmens (links) und die Korrelation der Referenz- und Überwachungsdaten sowie die Erstellung einer Range-Doppler-Karte (rechts). Jeder Balken zeigt die durchschnittliche Verarbeitungszeit und die Standardabweichung. Die gestrichelten Linien markieren die Echtzeitgrenze für beide Berechnungen.
Notebook: Als Leistungsreferenz verwendeten wir ein aktuelles Notebook mit einem Intel Core i7-6500-Prozessor mit 4 logischen 2,5-GHz-Kernen, das Ubuntu 18.04 LTS 64-Bit ausführt.
Raspberry Pi CPU: Wir haben unsere Software ohne Änderungen am Quellcode auf dem Raspberry Pi 3 Model B kompiliert, um die Baseline-Leistung nur der CPU-Plattform zu erhalten. Es lief Raspbian 9 Stretch, eine Variante von Debian, die für den Raspberry Pi optimiert ist, für beide Konfigurationen.
Raspberry Pi GPU: Wir haben den Quellcode unserer Software angepasst, um die FFT-Operationen auf der GPU des Raspberry Pi auszuführen.
Abbildung 7 zeigt die Leistung dieser Konfigurationen sowohl für die Signalrekonstruktion als auch für die Erstellung der Range-Doppler-Karte. Wir haben den Durchschnitt und die Standardabweichung für die Verarbeitungszeit der Referenzsignalgenerierung über etwa 5.500 DAB-Frames berechnet. Die Referenzzeit für die Verarbeitung eines einzelnen DAB-Rahmens (96 ms) ist durch die gestrichelte Linie gekennzeichnet. Alle unsere Konfigurationen arbeiten im Durchschnitt schneller als in Echtzeit für die Rekonstruktion des Referenzsignals. Wie erwartet, arbeitet das Notebook am besten und rekonstruiert einen Referenzrahmen in 25,2 ± 8,4 ms. Die Leistung des Raspberry Pi für beide Konfigurationen ist sehr ähnlich. Die GPU ist nur geringfügig schneller als die CPU, mit 73,4 ± 13,4 ms bzw. 79,9 ± 19,5 ms. Diese Zahlen zeigen, dass die Verwendung der GPU die durchschnittliche Verarbeitungszeit nur um weniger als 10,0 % verbessert hat. Obwohl dies zunächst überraschend sein mag, sind diese Leistungen auf die aktuelle Softwarearchitektur zurückzuführen, bei der jeder DAB-Rahmen sequenziell rekonstruiert wird. Das Kopieren der Daten in den relevanten Puffer, das Initiieren des GPU-Aufrufs und das Lesen des Ergebnisses für eine einzelne FFT verursachen jedoch einen erheblichen Overhead. In einer zukünftigen Iteration unserer Implementierung beabsichtigen wir, die OFDM-Demodulation zu parallelisieren, um mehrere FFTs in einem Batch durchführen zu können und so die schnellere FFT-Leistung der GPU zu nutzen.
Für die Erstellung der Range-Doppler-Karte haben wir den Durchschnitt und die Standardabweichung über insgesamt 127 Range-Doppler-Karten berechnet. Auch hier übertrifft das Notebook den Raspberry Pi.
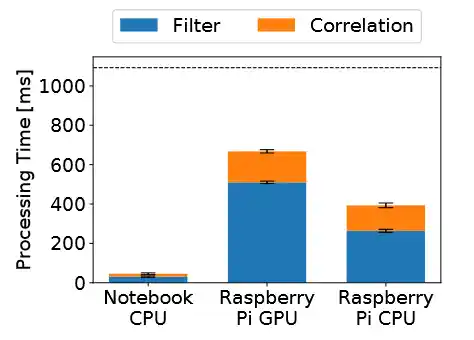
Fig. 8 zeigt die Leistungsmessungen für die FM-Performance bei der Filterung von direkten Signalstörungen (blau) und der Korrelation der Referenz- und Überwachungsdaten sowie dem Aufbau einer Range-Doppler-Karte (orange). Jede Leiste zeigt die durchschnittliche Verarbeitungszeit und die Standardabweichung. Die gestrichelte Linie markiert die Echtzeitgrenze für die Berechnungen.
Pi. Es konnte eine RDM in 60,3±8,6 ms berechnen. Die Integrationszeit von 645,7 ms ist durch die gestrichelte Linie in der Abbildung gekennzeichnet. Alle Konfigurationen, die unterhalb dieser Linie liegen, ermöglichen die Echtzeitgenerierung von Range-Doppler-Karten. In diesem Schritt sehen wir deutlich den Vorteil der Verwendung der GPU des Raspberry Pi zur Auslagerung der FFT-Berechnungen. Auf der CPU hat der Raspberry Pi etwa alle 1127,9±13,0 ms eine RDM generiert, während die GPU diese Zeit auf 276,1±10,4 ms reduzierte und somit eine Leistungssteigerung um den Faktor etwa 4 bietet. Da wir tatsächlich eine 2D-FFT über die resultierende Matrix durchführen, können wir zunächst 512 FFTs mit einer Größe von 2048 und dann 2048 FFTs mit einer Größe von 512 Samples durchführen. Wenn wir diese Datenmenge direkt an die GPU übergeben, wo die FFTs parallel durchgeführt werden, ist die Leistung viel schneller als bei der CPU, die all diese FFTs sequenziell berechnet. Die Nutzung der GPU ermöglicht es uns, Echtzeitleistung auf einem Raspberry Pi zu erreichen.
Für unsere FM-Verarbeitungspipeline haben wir etwa 200 Range-Doppler-Karten mit einer Größe von 512 mal 512 Samples verarbeitet. Die Ergebnisse sind in Abbildung 8 dargestellt. Wir haben durchschnittliche Zeiten von 509,8±6,4 ms für die Filterung und 157,7±8,5 ms für die Generierung der Range-Doppler-Karte auf der GPU des Raspberry Pi gemessen. Aufgrund der verminderten FFT-Größen läuft die FM-Pipeline schneller als ihr DAB-Gegenstück. Die CPI für die Range-Doppler-Karte betrug 1 s. Wenn wir dieselbe Pipeline auf der CPU des Raspberry Pi ausführen, ergeben sich niedrigere Verarbeitungszeiten aufgrund der sequenziellen FFT-Verarbeitung im DSI-Filterungsschritt, bei dem der Aufruf der GPU für einen einzelnen FFT-Vorgang langsamer ist als die direkte Berechnung auf der CPU.
Um zu bewerten, wie die Größe der Range-Doppler-Karte die Verarbeitungszeit beeinflusst, haben wir die FFT-Größe (d.h. die Integrationszeit bei konstanter Batch-Länge) im Doppler-Domänenbereich unserer DAB-Pipeline variiert (siehe Abbildung 9). Da die Integrationszeit mit der höheren FFT-Größe zunimmt, präsentieren wir die erforderliche Verarbeitungszeit im Verhältnis zur CPI-Dauer. Es ist offensichtlich, dass selbst mit einer Größe von 256 FFTs im Doppler-Domänenbereich die CPU des Raspberry Pi zu langsam ist, um die Daten zu verarbeiten.
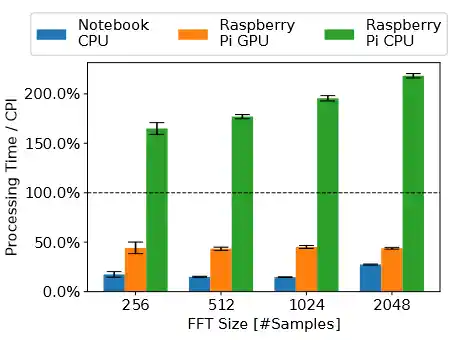
Fig. 9. Leistungsbeurteilung für die Verarbeitung der Range-Doppler-Karte mit variierenden FFT-Größen im Doppler-Bereich relativ zur CPI (gestrichelte Linie). Die Ergebnisse für eine FFT-Größe von 512 Samples entsprechen dem Korrelationsanteil in Abbildung 7.
In Echtzeit schafft es die GPU des Raspberry Pi, die Range-Doppler-Karte in weniger als 50 % der CPI-Dauer zu verarbeiten. Während die Verarbeitungszeit für die GPU des Raspberry Pi relativ zur CPI konstant bleibt, beginnen längere FFT-Größen, die Leistungsdifferenz zwischen der CPU des Notebooks und der GPU des Raspberry Pi zu verringern. Solch lange Integrationszeiten von zwei Sekunden oder mehr sind jedoch möglicherweise nicht in einem avionischen Kontext sinnvoll, aufgrund der hohen Geschwindigkeiten, mit denen Flugzeuge reisen.
Unsere Ergebnisse haben gezeigt, dass sowohl die FM- als auch die DAB-Systeme in der Lage sind, passive Radarberechnungen in Echtzeit durchzuführen. Die Gesamtleistung der Raspberry Pi-Plattform legt sogar nahe, dass zusätzliche Verarbeitungsschritte - wie zusätzliches Filtern oder CFAR-Verarbeitung - tatsächlich implementiert werden könnten, während sie immer noch schneller als Echtzeit durchgeführt werden.
B. Leistung des passiven Radars
Um die Leistung unseres Systems als passiven Radarempfänger zu bewerten, sind wir zum Flughafen Zürich gegangen und haben unsere Ausrüstung auf dem Parkplatz am Ende der Start- und Landebahn aufgestellt. Die Signale wurden mit einer Yagi-Antenne aufgezeichnet, die parallel zur Ausrichtung der Landebahn und abgewandt vom Flughafen zeigte.
Die Ergebnisse unserer DAB-Messungen sind in den Abbildungen 10 und 11 dargestellt. Abbildung 10 zeigt einen Max-Hold über eine Serie von 753 Range-Doppler-Karten. Mehrere deutliche Flugzeugspuren während ihres Anflugs auf den Flughafen sind unten links zu sehen. Die Flugzeuge begannen bei einer bistatischen Reichweite von etwa 30 km sichtbar zu werden. Es ist auch eine schwächere Spur sichtbar, die sich von der Null-Doppler-Linie bei etwa 45 km bis zu einer bistatischen Reichweite von 55 km und 150 Hz Doppler erstreckt. Da unser experimenteller Standort in einem Tal lag, war eine längere Reichweitenentdeckung von Echos nicht machbar. Die Abbildung zeigt auch starke Störungen in der Nähe der Null-Reichweite und Null-Doppler, die mit den Frequenzinstabilitäten des Empfängers zu tun zu haben scheinen. Diese Störungen traten periodisch nach einer Anzahl von generierten RDMs auf. Abbildung 11 zeigt eine gefilterte Version der gleichen Daten und zeigt eine zusätzliche Spur, die links bei etwa 50 Hz Doppler-Verschiebung beginnt.
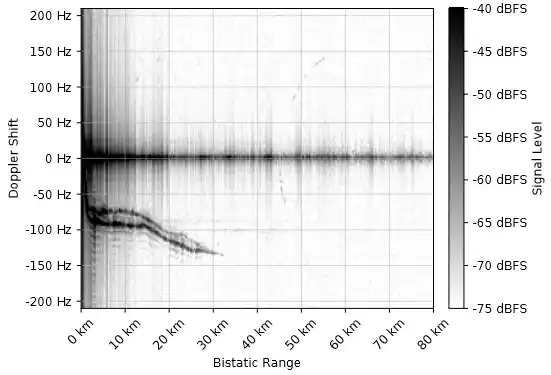
Abb. 10. Maximalwerthalten einer Serie von 753 Reichweiten-Doppler-Karten über einen Zeitraum von 486 Sekunden basierend auf unserer DAB-Konfiguration.
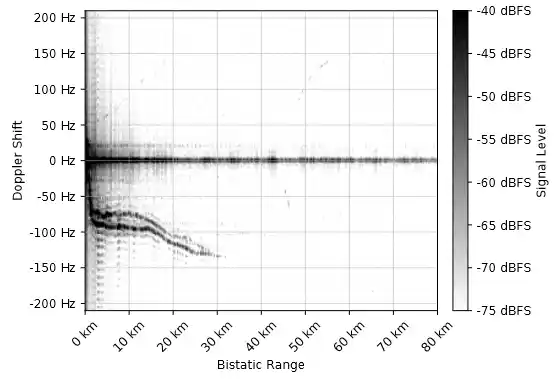
Fig. 11. Eine Visualisierung derselben Daten wie in Abbildung 10, jedoch mit entfernten Rahmen, wenn das Rauschen 10% des durchschnittlichen Hintergrundrauschens übersteigt.
Obwohl wir Erkennungen in RDMs basierend auf FM-Signalen hatten, waren die Ergebnisse aufgrund der analogen Modulation zu rauschig, um sie sinnvoll ohne zusätzliche CFAR-Verarbeitung zu visualisieren.
V. SCHLUSSFOLGERUNG
In dieser Arbeit haben wir gezeigt, dass die Entwicklung von IoT-Geräten Berechnungen auf kostengünstigen, platzsparenden Plattformen ermöglicht, wo vor einem Jahrzehnt noch ein ganzer Cluster von Computern notwendig war. Wir nehmen an, dass die Leistung unseres Systems durch die Verwendung von optimiertem Code, Datenstrukturoptimierungen und prozessorspezifischen Befehlssätzen noch erheblich verbessert werden könnte. Als zukünftige Arbeit werden wir untersuchen, wie die aktuelle ARM-Neon-Architektur des Raspberry Pi zur Optimierung von sequenziellen FFT- und nicht-FFT-Verarbeitungsstufen genutzt werden könnte.
Unsere Ergebnisse haben gezeigt, dass kostengünstige Funkplattformen wie der RTL-SDR - trotz ihrer Einschränkungen und Rauschen im Vergleich zu professionellen SDR-Plattformen - immer noch mehr als fähig sind, Signale in einer Qualität für passive Radaroperationen zu erfassen und zu digitalisieren. Unser System, das weniger als 100 USD kostet, ist in der Lage, Flugzeuge mit beträchtlichem SNR in einer bis zu 30 km bistatischen Reichweite zu erkennen.
QUELLEN
E. Upton. (2016, Februar) Raspberry Pi 3 jetzt für $35 erhältlich. [Online].
Verfügbar: https://www.raspberrypi.org/blog/raspberry-pi-3-on-sale/
FlightAware. Zugriff: 2019-02-18. [Online]. Verfügbar:
Flightradar24. Zugriff: 2019-02-18. [Online]. Verfügbar:
M. Sch¨afer, M. Strohmeier, V. Lenders, I. Martinovic und M. Wilhelm,
„Bringing Up OpenSky: A Large-scale ADS-B Sensor Network for
Research“, in Proceedings of the 13th International Symposium on
Information Processing in Sensor Networks, ser. IPSN ’14, Berlin,
Deutschland, April 2014, S. 83–94.
P. E. Howland, D. Maksimiuk und G. Reitsma, „FM radio based bistatic
radar“, IEE Proceedings - Radar, Sonar and Navigation, Bd. 152, Nr. 3,
S. 107–115, Juni 2005.
H. Griffiths und N. Willis, „Klein Heidelberg—the first modern bistatic
radar system“, IEEE Transactions on Aerospace and Electronic Systems,
Bd. 46, Nr. 4, S. 1571–1588, Okt. 2010.
J. L. Sendall et al., „Implementation of a low-cost bistatic radar“,
Masterarbeit, Universität Pretoria.
RTL-SDR V3. Zugriff: 2019-02-18. [Online]. Verfügbar:
https://www.rtl-sdr.com/buy-rtl-sdr-dvb-t-dongles/
R. Calvo-Palomino, F. Ricciato, D. Giustiniano und V. Lenders,
„LTESS-track: A Precise and Fast Frequency Offset Estimation for Low-
cost SDR Platforms“, in Proceedings of the 11th Workshop on Wireless
Network Testbeds, Experimental Evaluation & Characterization, ser.
WiNTECH ’17. New York, NY, USA: ACM, 2017, S. 51–58.
[Online]. Verfügbar: http://doi.acm.org/10.1145/3131473.3131481
M. Frigo, „A fast fourier transform compiler“, in Proceedings
of the ACM SIGPLAN 1999 Conference on Programming
Language Design and Implementation, ser. PLDI ’99. New
York, NY, USA: ACM, 1999, S. 169–180. [Online]. Verfügbar:
http://doi.acm.org/10.1145/301618.301661
A. Holme. (2015, März) GPU FFT. [Online]. Verfügbar:
http://www.aholme.co.uk/GPU FFT/Main.htm
J. L. Garry, C. J. Baker und G. E. Smith, „Evaluation of Direct Signal
Suppression for Passive Radar“, IEEE Transactions on Geoscience and
Remote Sensing, Bd. 55, Nr. 7, S. 3786–3799, Juli 2017.
C. Sch¨upbach, C. Patry, F. Maasdorp, U. B¨oniger und P. Wellig, „Micro-
UAV detection using DAB-based passive radar“, in 2017 IEEE Radar
Conference (RadarConf), Mai 2017, S. 1037–1040.
O. Mahfoudia, F. Horlin und X. Neyt, „On the feasibility of DVB-T
based passive radar with a single receiver channel“, in International
Conference on Radar Systems (Radar 2017), Okt. 2017, S. 1–6.
C. Moscardini, D. Petri, A. Capria, M. Conti, M. Martorella und
F. Berizzi, „Batches algorithm for passive radar: a theoretical analysis“,
IEEE Transactions on Aerospace and Electronic Systems, Bd. 51, Nr. 2,
S. 1475–1487, April 2015.
C. Sch¨upbach und S. Welschen, „Direct signal interference mitigation by
slow-time frequency correction for ofdm-based passive radar“, in 2018
19th International Radar Symposium (IRS), Juni 2018, S. 1–10.